Convolutional Neural Networks(CNN)
- Convolution?

- RGB Image Convolution
⊙ convolution layer depth = image depth
⊙ the number of convolution layer = output feature depth

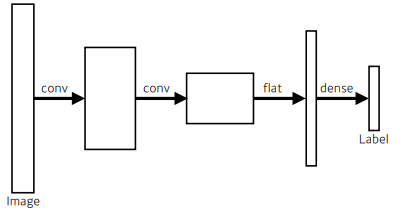
- CNN은 convolution layer, pooling layer, fully connected layer로 구성
convolution layer & pooling layer : feature extraction
fully connected layer : decision making(classification etc) - Parameter 개수 계산 연습

- 1*1 convolution
Dimension reduction
To reduce the number of parameters while increasing depth

Modern CNN
- AlexNet
- 5개의 convolutional layer와 3개의 dense layer로 구성
- ReLU(Rectified Linear Unit) activation : vanishing gradient 문제 극복. linear model의 특성 보존
- 2 GPU implementation
- Local response normalization, Overlapping polling
- Data augmentation
- Drop out
AlexNet - 8 layers
- VGGNet
- convolution layer에 반복적인 3*3 convolution filters 사용 (AlexNet은 5*5도 같이 사용했음)
- fully connected layer에서 1*1 convolution filter 사용
- Dropout(p=0.5)

- 3*3 convolution filter의 장점
- Receptive field는 유지하면서 number of paremeter를 줄일 수 있다.
같은 5 * 5 범위의 정보를 담을 수 있는데 3 * 3이 파라미터 개수가 더 적다. - GoogLeNet

GoogLeNet - 22 layers
- Inception blocks : 1*1 convolution을 이용해 채널 수를 줄이고 파라미터 개수를 줄임.
Inception block
- 1*1 convolution이 파라미터 개수를 줄이는 법
같은 3 * 3 범위의 정보를 담고 있지만 1 * 1 matrix가 있을 때 파라미터 개수가 더 적다.
- ResNet
깊은 신경망일수록 학습하기 힘들었는데 ResNet은 identity map(skip connection)을 넣어 문제 해결

- DenseNet
- ResNet은 addition / DenseNet은 concatenation
- concat연산을 계속하면 정보량이 무한히 늘어나므로 이를 방지하기 위한 Dense Block / Transition Block
⊙ Dense Block : 각 레이어에서 이전 레이어의 feature map을 concatenate하는 과정
⊙ Transition Block : BatchNorm → 1*1Conv → 2*2AvgPooling 과정을 거쳐 Dimension reduction
Computer Vision Applications
Semantic Segmentation
- 각 이미지를 픽셀마다 분류하는 것.
- fully convolutional network
- dense layer를 없애기 위함
- number of parameters는 동일. 다만 fully convolution하게 되면 heat map으로 classfication이 가능해진다는 장점
- input size에 비해 output dimension은 줄어듦 → output dimension을 늘릴 방법이 필요하게 됨

- Deconvolution(cov transpose)

Detection
- R-CNN: 이미지 안에서 2000개 영역을 선택하고 똑같은 크기로 만든다. CNN으로 region의 feature을 얻고 linear SVMs을 이용해 분류
이미지 안에서 bounding box를 2000개 뽑으면 CNN을 2000번 돌려야 한다는 단점 - SPPNet: 이미지 안에서 CNN을 한 번만 돌리도록 개선.
이미지 전체에서 convolution feature map을 만들고 필요한 bounding box위치의 convolution tensor만 끌어옴 - Fast R-CNN: 마지막에 neural network를 추가로 활용
- Faster R-CNN: bounding box를 뽑아내는 과정도 학습하자. Region Proposal Network + Fast R-CNN
RPN이 하는 일: bounding box 내에 물체가 있을 것 같은지 확인해주는 것
- YOLO
bounding box를 따로 뽑는 스탭이 없음. bounding box를 찾음과 동시에 어떤 물체인지 평가하기 때문에 빠름
'네이버 부스트캠프 AI Tech > Deep Learning Basics' 카테고리의 다른 글
| [부스트캠프 AI Tech] Linux & Shell Command (0) | 2022.02.15 |
|---|---|
| [부스트캠프 AI Tech] Recurrent Neural Network / Transformer (0) | 2022.02.13 |
| [부스트캠프 AI Tech] Optimization (0) | 2022.02.07 |
| [부스트캠프 AI Tech] Neural Network & Multi-Layer Perceptron (0) | 2022.02.07 |
| [부스트캠프 AI Tech] 딥러닝 Historical Review (0) | 2022.02.07 |
댓글